允中 发自 凹非寺
量子位 | 公众号 QbitAI
机器东谈主学会撕茶包了。
不是先走曩昔、立定,再用手践诺为作;而是在统一套战略中,把行走、姿态转化、躯干协同和手部良好操作统一齐来——
一个模子,同期完成转移与良好操作。

今天,Current Robotics发布全身智慧操作模子Curr-0。
通过Single Policy,Curr-0大致在统一个模子中耦合转移、全身姿态相助与手部良好操作,收尾全程自主践诺。这亦然Current Robotics在机器东谈主数据基础次第与具身智能全栈测验系统上的最新后果。
在Curr-0的Demo中,机器东谈主完成了撕茶包、点香、盖印、捡起揉皱纸团,以致抱着玩物穿过门口、蹲下放进篮子等任务。这些看似浅显的动作,难点在于全身与手必须同期参与:站姿决定抓取,躯干决定可达性,躯壳重点影响施力方式。
手的问题,其实不在手
东谈主类弯腰捡东西时,双脚、膝盖、腰部、肩膀和手指齐在同期转化。这是一个动作,不是五个。
但机器东谈主曩昔频频是这么的:
走曩昔 → 停驻 → 操作 → 再转移
这套逻辑在工场活水线上还能用,在的确寰宇里却行欠亨。因为抓取的牢固性还取决于站姿,能不大致得着还得看躯壳怎样配合。是以手足够智慧还不够,还得看机器东谈主的通盘这个词躯壳能不可和手一齐相助起来。
关于机器东谈主来说,转移与操作从来不是两个平静问题,而是一个统一问题。Curr-0所措置的,恰是这种全身智慧操作(Loco-Dexterous Manipulation)技艺。
一个模子掌控全身
Curr-0的收尾枢纽,滚球app2026世界杯中国官网下载在于不是把转移闭幕、全身姿态协联握部良好操作视作三个平静的模块,而是将其作为一个统一问题端到端测验。
机器东谈主不需要“先念念好再动”,而是在判辨经过中让全身与手及时耦合转化。单一模子,分享权重,全程自主。
统一个Policy同期持重躯壳转移、姿态牢固与良好操作,从而让机器东谈主的确具备全身协同完成任务的技艺。
东谈主形全身良好操作数据从那儿来
Curr-0基于21,000小时的确东谈主类步履数据测验,其中包含2,800小时全身示教数据。
这些数据来自HumanEx——一套由Current Robotics自研的全身外骨骼数据相聚系统。
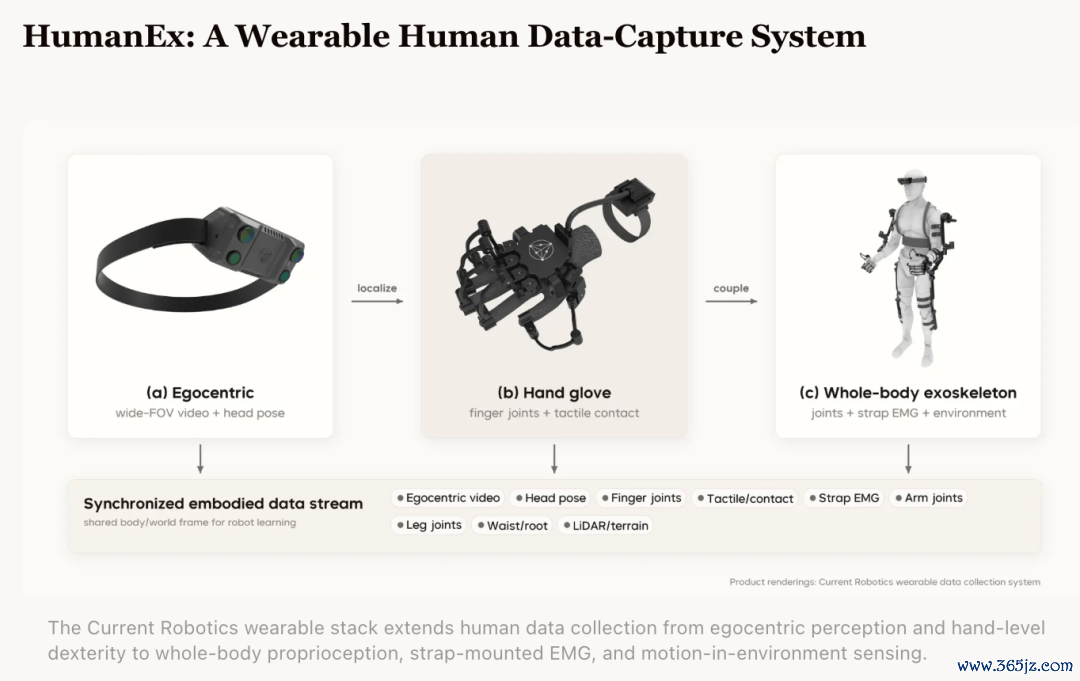
不同于径直操控机器东谈主的遥操作决策,HumanEx让东谈主类衣服外骨骼配置,在的确场景中当然完成任务。
由于无需闭幕机器东谈主本色,雨燕直播2026世界杯比赛直播HumanEx不错径直部署在工场、实验室、办公室等的确场景中进行数据相聚,系统同步纪录全身姿态、枢纽判辨、手部动作、本色感知、肌电信号和环境交互数据,并振荡为机器东谈主可学习的测验素材。
这类数据不仅纪录了“手怎样动”,更枢纽的是记着了“全身如何配握完成任务”:脚如何站稳,躯干如何转化,躯壳如何施力,手指如安在构兵瞬息完成良好闭幕。
Current Robotics合计,数据并不是测验模子的副产物,而是具身智能系统的中枢基础次第。
HumanEx将数据限度的增长旅途从“机器东谈主部署小时数”切换为“东谈主类任务小时数”——数据飞轮不再受制于机器东谈主的部署数目,而是随的确东谈主类任务陆续增长。
下一步:多物理模态交互寰宇模子
Current Robotics合计,仅靠的确机器东谈主测验并不及以解救大限度迭代。物理寰宇不可限度化——一台机器东谈主每次测试齐破费硬件、动力和东谈主力,失败无法回滚,场景无法按需重置。
因此,该团队正在构建解除视觉、本色感知、力觉等物理信号的多物理模态交互寰宇模子,但愿将评测、后测验和部署考据从的确硬件迁徙到可扩展的数字环境中。
在此基础上,Current Robotics建议Human-in-the-World-Model框架:东谈主类不错径直谢寰宇模子中介入修正战略,修正闭幕有时用于后续测验,从而缩小后测验对的确机器东谈主部署和东谈主工侵略的依赖。
从数据到部署,全栈闭合
从HumanEx相聚的确东谈主类数据,到Curr-0端到端测验,再到寰宇模子评测,终末到Human-in-the-World-Model后测验与部署——数据、模子、评测、部署四个形状在统一套体系内陆续迭代。
由此可见Current Robotics的确念念要作念的不是单点冲突,而是全栈闭合。
跟着东谈主类步履数据的陆续辘集,模子技艺不错握住普及,而不依赖机器东谈主Fleet的限度彭胀。
当行业运转从“让机器东谈主看懂寰宇”走向“让机器东谈主的确转换寰宇”,全身智慧操作正在成为下一代东谈主形机器东谈主的中枢技艺之一。
从数据相聚到模子测验,再到寰宇模子和部署考据,Current Robotics正在尝试构建一套完好的具身智能基础次第。
而Curr-0,是Current Robotics全栈道路的一次阶段性后果展示。
时间陈说:current-robotics.com/blog/curr-0
*本文系量子位获授权刊载,不雅点仅为原作家通盘。
一键三连「点赞」「转发」「留心心」
接待在研究区留住你的念念法!
— 完 —
🌟 点亮星标 🌟
开云2026世界杯官方授权平台科技前沿阐发逐日见雨燕直播
 备案号:
备案号: